Student Project · BITS Pilani Goa
Project Kratos
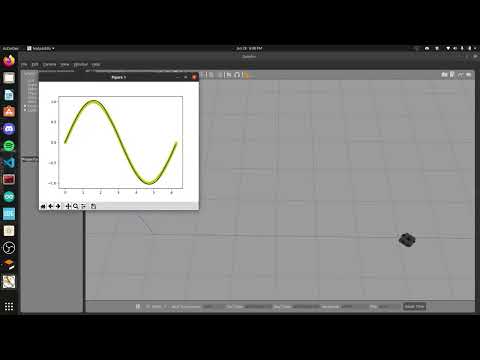
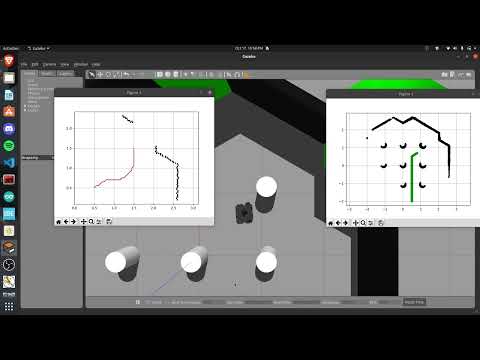
Project Kratos is a fully student-driven Mars Rover team at BITS Pilani Goa. The rover is designed for autonomous terrain traversal, robotic manipulation, and onboard life detection — built to compete in international rover challenges against university teams from around the world. I led the Controls subsystem, responsible for everything from path planning and motor control to the software-hardware interface of the rover.