Research Internship · HiPeRT Lab, University of Modena and Reggio Emilia
F1/10 Autonomous Racing
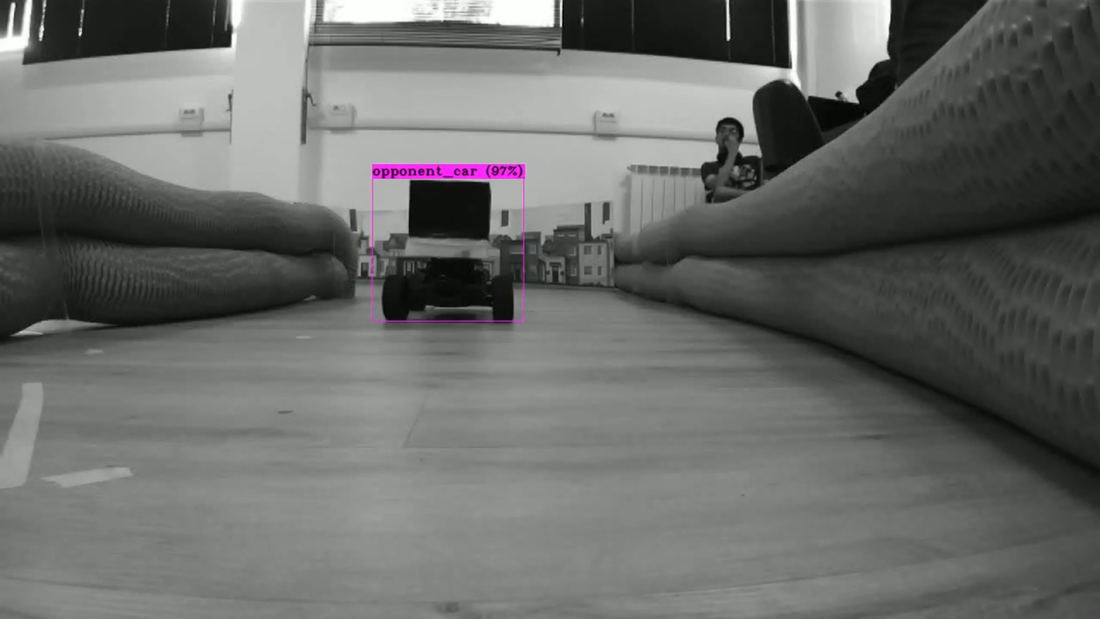
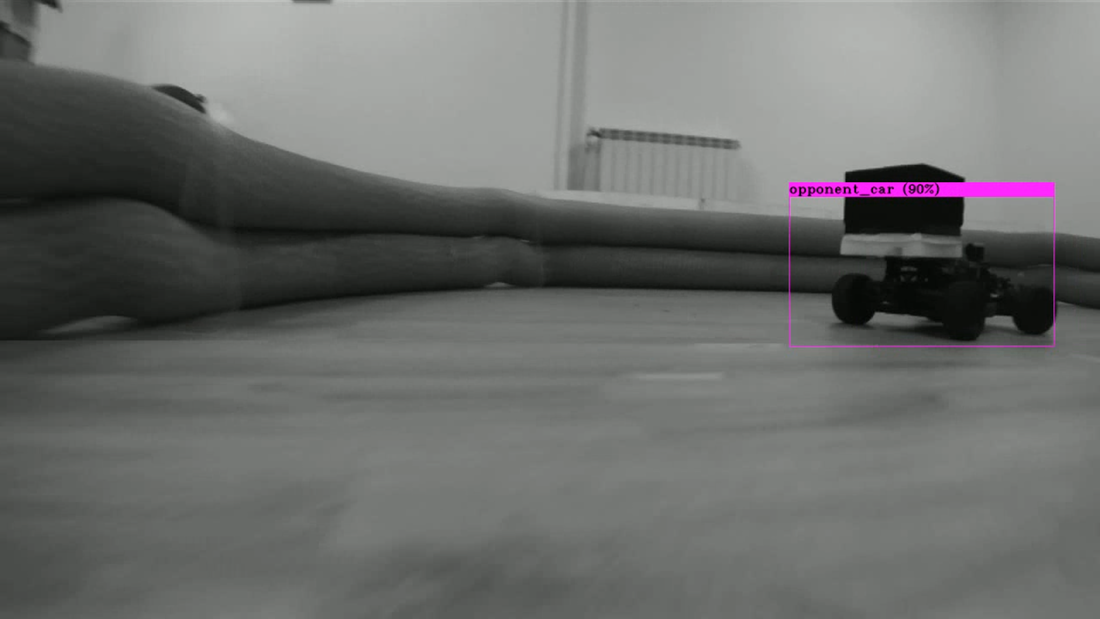
RoboRacer.ai (formerly known as F1/10) is an international autonomous racing platform — 1/10th scale cars racing head-to-head, fully autonomously. I spent six months at HiPeRT Lab in Modena as part of the RoboRacer.ai team, working on two distinct problems: teaching the car to see its opponents, and teaching it to follow a racing line smoothly. This work also formed the basis of my undergraduate thesis.